LUMI Training - Tallin, Estonia (October 2025)¶
Login to Lumi¶
ssh USERNAME@lumi.csc.fi
# LUMI
Host lumi
User <USERNAME>
Hostname lumi.csc.fi
IdentityFile <HOME_DIRECTORY>/.ssh/id_rsa
ServerAliveInterval 600
ServerAliveCountMax 30
ServerAlive* lines in the config file may be added to avoid timeouts when idle.
Now you can shorten your login command to the following.
ssh lumi
If you are able to log in with the ssh command, you should be able to use the secure copy command to transfer files. For example, you can copy the presentation slides from lumi to view them.
scp lumi:/project/project_465002175/Slides/AMD/<file_name> <local_filename>
You can also copy all the slides with the . From your local system:
mkdir slides
scp -r lumi:/project/project_465002175/Slides/AMD/* slides
If you don't have the additions to the config file, you would need a longer command:
mkdir slides
scp -r -i <HOME_DIRECTORY>/.ssh/<public ssh key file> <username>@lumi.csc.fi:/project/project_465002175/slides/AMD/ slides
or for a single file
scp -i <HOME_DIRECTORY>/.ssh/<public ssh key file> <username>@lumi.csc.fi:/project/project_465002175/slides/AMD/<file_name> <local_filename>
HIP Exercises¶
We assume that you have already allocated resources with salloc
cp -r /project/project_465002175/Exercises/AMD/HPCTrainingExamples/ .
salloc -N 1 -p standard-g --gpus=1 -t 10:00 -A project_465002175 --reservation LUMI_advanced_gpu
module load craype-accel-amd-gfx90a
module load PrgEnv-amd
module load rocm
The examples are also available on github:
git clone https://github.com/amd/HPCTrainingExamples
However, we recommend using the version in /project/project_465002175/Exercises/AMD/HPCTrainingExamples as it has been tuned to the current LUMI environment.
Basic examples¶
cd HPCTrainingExamples/HIP/vectorAdd
Examine files here – README, Makefile and vectoradd_hip.cpp. Notice that Makefile requires HIP_PATH to be set. Check with module show rocm or echo $HIP_PATH Also, the Makefile builds and runs the code. We’ll do the steps separately. Check also the HIPFLAGS in the Makefile.
export HCC_AMDGPU_TARGET=gfx90a
make
srun -n 1 ./vectoradd
We can use SLURM submission script, let's call it hip_batch.sh:
#!/bin/bash
#SBATCH -p standard-g
#SBATCH -N 1
#SBATCH --gpus=1
#SBATCH -t 10:00
#SBATCH --reservation LUMI_advanced_gpu
#SBATCH -A project_465002175
module load craype-accel-amd-gfx90a
module load rocm
cd $PWD/HPCTrainingExamples/HIP/vectorAdd
export HCC_AMDGPU_TARGET=gfx90a
make vectoradd
srun -n 1 --gpus 1 ./vectoradd
Submit the script
sbatch hip_batch.sh
Check for output in slurm-<job-id>.out or error in slurm-<job-id>.err
Compile and run with Cray compiler
CC -x hip vectoradd.hip -o vectoradd
srun -n 1 --gpus 1 ./vectoradd
Now let’s try the cuda-stream example from https://github.com/ROCm-Developer-Tools/HIP-Examples. This example is from the original McCalpin code as ported to CUDA by Nvidia. This version has been ported to use HIP. See add4 for another similar stream example.
git clone https://github.com/ROCm-Developer-Tools/HIP-Examples
export HCC_AMDGPU_TARGET=gfx90a
cd HIP-Examples/cuda-stream
make
srun -n 1 ./stream
Note that it builds with the hipcc compiler. You should get a report of the Copy, Scale, Add, and Triad cases.
The variable export HCC_AMDGPU_TARGET=gfx90a is not needed in case one sets the target GPU for MI250x as part of the compiler flags as --offload-arch=gfx90a.
Now check the other examples in HPCTrainingExamples/HIP like jacobi etc.
Hipify¶
We’ll use the same HPCTrainingExamples that were downloaded for the first exercise.
Get a node allocation.
salloc -N 1 --ntasks=1 --gpus=1 -p standard-g -A project_465002175 –-t 00:10:00`--reservation LUMI_advanced_gpu
A batch version of the example is also shown.
Hipify Examples¶
Exercise 1: Manual code conversion from CUDA to HIP (10 min)¶
Choose one or more of the CUDA samples in HPCTrainingExamples/HIPIFY/mini-nbody/cuda directory. Manually convert it to HIP. Tip: for example, the cudaMalloc will be called hipMalloc.
Some code suggestions include nbody-block.cu, nbody-orig.cu, nbody-soa.cu
You’ll want to compile on the node you’ve been allocated so that hipcc will choose the correct GPU architecture.
Exercise 2: Code conversion from CUDA to HIP using HIPify tools (10 min)¶
Use the hipify-perl script to “hipify” the CUDA samples you used to manually convert to HIP in Exercise 1. hipify-perl is in $ROCM_PATH/bin directory and should be in your path.
First test the conversion to see what will be converted
hipify-perl -no-output -print-stats nbody-orig.cu
You'll see the statistics of HIP APIs that will be generated.
[HIPIFY] info: file 'nbody-orig.cu' statisitics:
CONVERTED refs count: 10
TOTAL lines of code: 91
WARNINGS: 0
[HIPIFY] info: CONVERTED refs by names:
cudaFree => hipFree: 1
cudaMalloc => hipMalloc: 1
cudaMemcpy => hipMemcpy: 2
cudaMemcpyDeviceToHost => hipMemcpyDeviceToHost: 1
cudaMemcpyHostToDevice => hipMemcpyHostToDevice: 1
hipify-perl is in $ROCM_PATH/bin directory and should be in your path. In some versions of ROCm, the script is called hipify-perl.
Now let's actually do the conversion.
hipify-perl nbody-orig.cu > nbody-orig.cpp
Compile the HIP programs.
hipcc -DSHMOO -I ../ nbody-orig.cpp -o nbody-orig
The `#define SHMOO` fixes some timer printouts.
Add `--offload-arch=<gpu_type>` if not set by the environment to specify
the GPU type and avoid the autodetection issues when running on a single
GPU on a node.
-
Fix any compiler issues, for example, if there was something that didn’t hipify correctly.
-
Be on the lookout for hard-coded Nvidia specific things like warp sizes and PTX.
Run the program
srun ./nbody-orig
A batch version of Exercise 2 is:
#!/bin/bash
#SBATCH -N 1
#SBATCH --ntasks=1
#SBATCH --gpus=1
#SBATCH -p standard-g
#SBATCH -A project_465002175
#SBATCH -t 00:10:00
#SBATCH --reservation LUMI_advanced_gpu
module load craype-accel-amd-gfx90a
module load rocm
export HCC_AMDGPU_TARGET=gfx90a
cd HPCTrainingExamples/mini-nbody/cuda
hipify-perl -print-stats nbody-orig.cu > nbody-orig.cpp
hipcc -DSHMOO -I ../ nbody-orig.cpp -o nbody-orig
srun ./nbody-orig
cd ../../..
Notes:
-
Hipify tools do not check correctness
-
hipconvertinplace-perlis a convenience script that doeshipify-perl -inplace -print-statscommand
Rocprof¶
Setup environment
salloc -N 1 --gpus=8 -p standard-g --exclusive -A project_465002175 -t 20:00 --reservation LUMI_advanced_gpu
module load PrgEnv-cray
module load craype-accel-amd-gfx90a
module load rocm
Obtain examples repo and navigate to the HIPIFY exercises
cd HPCTrainingExamples/HIPIFY/mini-nbody/hip/
Compile and run one case. We are on the front-end node, so we need to point he tools to use the correct GPU:
export HCC_AMDGPU_TARGET=gfx90a
make nbody-orig
Now run rocprof on nbody-orig to obtain hotspots list
srun rocprof --stats nbody-orig 65536
Check Results
cat results.csv
Check the statistics result file, one line per kernel, sorted in descending order of durations
cat results.stats.csv
Using --basenames on will show only kernel names without their parameters.
srun rocprof --stats --basenames on nbody-orig 65536
Check the statistics result file, one line per kernel, sorted in descending order of durations
cat results.stats.csv
Trace HIP calls with --hip-trace
srun rocprof --stats --hip-trace nbody-orig 65536
Check the new file results.hip_stats.csv
cat results.hip_stats.csv
Profile also the HSA API with the --hsa-trace
srun rocprof --stats --hip-trace --hsa-trace nbody-orig 65536
Check the new file results.hsa_stats.csv
cat results.hsa_stats.csv
On your laptop, download results.json
scp -i <HOME_DIRECTORY>/.ssh/<public ssh key file> <username>@lumi.csc.fi:<path_to_file>/results.json results.json
Open a browser and go to https://ui.perfetto.dev/.
Click on Open trace file in the top left corner.
Navigate to the results.json you just downloaded.
Use the keystrokes W,A,S,D to zoom in and move right and left in the GUI
Navigation
w/s Zoom in/out
a/d Pan left/right
Perfetto issue¶
You could open a browser and go to https://ui.perfetto.dev/ to load the latest version of the tool but we recomment using an older version that is known to work well with traces generated by rocprof. For that, make sure you start a session to connect to LUMI as:
ssh -i <HOME_DIRECTORY>/.ssh/<public ssh key file> <username>@lumi-uan01.csc.fi -L10000:uan01:10000
and then connect to http://localhost:10000.
Alternatively you can run perfetto on your laptop if you have a Docker installed with:
docker run -it --rm -p 10000:10000 --name myperfetto sfantao/perfetto4rocm
You need to have the Docker daemon running in your workstation, e.g.:
sudo dockerd
We can now proceed to connect your web browser to: http://localhost:10000 and open the trace.
Read about hardware counters available for the GPU on this system (look for gfx90a section)
less $ROCM_PATH/lib/rocprofiler/gfx_metrics.xml
Create a rocprof_counters.txt file with the counters you would like to collect
vi rocprof_counters.txt
Content for rocprof_counters.txt:
pmc : Wavefronts VALUInsts
pmc : SALUInsts SFetchInsts GDSInsts
pmc : MemUnitBusy ALUStalledByLDS
Execute with the counters we just added:
srun rocprof --timestamp on -i rocprof_counters.txt nbody-orig 65536
You'll notice that rocprof runs 3 passes, one for each set of counters we have in that file.
Contents of rocprof_counters.csv
cat rocprof_counters.csv
Exploring RocprofV3¶
Rocprofv3 is becoming the recommended version for ROCm 6.2 onward. You can experiment with this version by running:
module use /appl/local/containers/test-modules
module load rocm/6.2.2
We can now repeat the experiment we did before and obtain a HIP trace with the kernels and copy information:
srun rocprofv3 --hip-trace --kernel-trace --memory-copy-trace --output-format=pftrace -- ./nbody-orig 65536
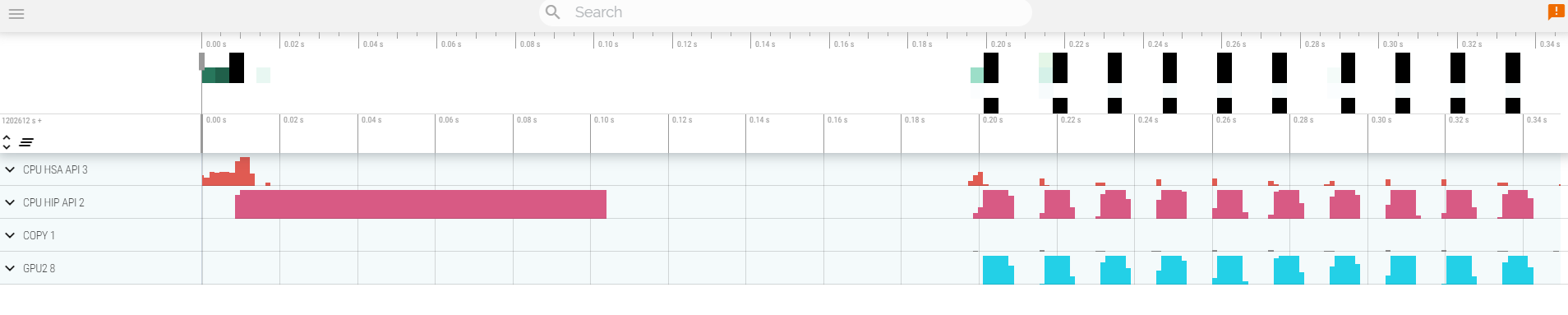
Notice the difference in the options in comparison to rocprof V1. One can be more selective on what to collect. You would also notice that the profiler is faster and has less overhead. It also has the choice of using pftrace format that are more compatible with latest versions of the Perfetto UI https://ui.perfetto.dev/. The trace will look similar to what seen before with a slightly different convention for the namming of the different sections:

Omnitrace¶
-
Load Omnitrace
For ROCm versions older than 6.2, Omnitrace is not installed as part of the ROCm suite. So we use a separate instalation for this.
module load craype-accel-amd-gfx90a module load PrgEnv-amd module load cray-python module use /appl/local/containers/test-modules module load rocm/6.0.3 omnitrace/1.12.0-rocm6.0.x -
Allocate resources with
sallocsalloc -N 1 --ntasks=1 --partition=standard-g --gpus=1 -A project_465002175 --time=00:15:00 --reservation LUMI_advanced_gpu -
Check the various options and their values and also a second command for description
srun -n 1 --gpus 1 omnitrace-avail --categories omnitracesrun -n 1 --gpus 1 omnitrace-avail --categories omnitrace --brief --description -
Create an Omnitrace configuration file with description per option
srun -n 1 omnitrace-avail -G omnitrace.cfg --all -
Declare to use this configuration file:
export OMNITRACE_CONFIG_FILE=/path/omnitrace.cfg -
Get the training examples:
cp -r /project/project_465002175/Exercises/AMD/HPCTrainingExamples/ . -
Compile and execute saxpy
cd HPCTrainingExamples/HIP/saxpy hipcc --offload-arch=gfx90a -O3 -o saxpy saxpy.hip time srun -n 1 ./saxpy -
Check the duration
-
Compile and execute Jacobi
cd HIP/jacobi -
Now build the code
make -f Makefile.cray time srun -n 1 --gpus 1 Jacobi_hip -g 1 1 -
Check the duration
Dynamic instrumentation (the commands take a significant ammount of time)¶
-
Execute dynamic instrumentation:
and check the durationtime srun -n 1 -c 7 --gpus 1 omnitrace-instrument -- ./saxpy -
About Jacobi example, as the dynamic instrumentation would take long time, check what the binary calls and gets instrumented:
nm --demangle Jacobi_hip | egrep -i ' (t|u) ' -
Available functions to instrument:
srun -n 1 -c 7 --gpus 1 omnitrace-instrument -v 1 --simulate --print-available functions -- ./Jacobi_hip -g 1 1- the simulate option means that it will not execute the binary
Binary rewriting (to be used with MPI codes and decreases overhead)¶
-
Binary rewriting:
srun -n 1 --gpus 1 omnitrace-instrument -v -1 --print-available functions -o jacobi.inst -- ./Jacobi_hip- We created a new instrumented binary called
jacobi.inst
- We created a new instrumented binary called
-
Executing the new instrumented binary:
and check the durationtime srun -n 1 --gpus 1 omnitrace-run -- ./jacobi.inst -g 1 1 -
See the list of the instrumented GPU calls:
cat omnitrace-jacobi.inst-output/TIMESTAMP/roctracer.txt
Visualization¶
- Copy the perfetto-trace.proto to your laptop, open the web page
https://ui.perfetto.dev/v46.0-35b3d9845/#/. Click to open the trace and select the file
Hardware counters¶
-
See a list of all the counters:
srun -n 1 --gpus 1 omnitrace-avail --all -
Declare in your configuration file:
OMNITRACE_ROCM_EVENTS = GPUBusy,Wavefronts,VALUBusy,L2CacheHit,MemUnitBusy -
Execute:
and copy the perfetto file and visualizesrun -n 1 --gpus 1 omnitrace-run -- ./jacobi.inst -g 1 1
Sampling¶
Activate in your configuration file OMNITRACE_USE_SAMPLING = true and OMNITRACE_SAMPLING_FREQ = 100, execute and visualize
Kernel timings¶
-
Open the file
omnitrace-binary-output/timestamp/wall_clock.txt(replace binary and timestamp with your information) -
In order to see the kernels gathered in your configuration file, make sure that
OMNITRACE_USE_TIMEMORY = trueandOMNITRACE_FLAT_PROFILE = true, execute the code and open again the fileomnitrace-binary-output/timestamp/wall_clock.txt
Omniperf¶
-
Load Omniperf:
Omniperf uses a separate instalation as it is not part of ROCm before its version 6.2. Let's load it in our environment.
module load craype-accel-amd-gfx90a module load PrgEnv-amd module load cray-python module use /appl/local/containers/test-modules module load rocm/6.0.3 omniperf/2.1.0 -
Reserve a GPU, compile the exercise and execute Omniperf, observe how many times the code is executed
salloc -N 1 --ntasks=1 --partition=small-g --gpus=1 -A project_465002175 --time=00:30:00 cp -r /project/project_465002175/Exercises/AMD/HPCTrainingExamples/ . cd HPCTrainingExamples/HIP/dgemm/ mkdir build cd build cmake .. make cd bin srun -n 1 -c 7 omniperf profile -n dgemm -- ./dgemm -m 8192 -n 8192 -k 8192 -i 1 -r 10 -d 0 -o dgemm.csv -
Run
to see all the optionssrun -n 1 --gpus 1 omniperf profile -h -
Now is created a workload in the directory workloads with the name dgemm (the argument of the -n). So, we can analyze it
srun -n 1 --gpus 1 omniperf analyze -p workloads/dgemm/MI200/ &> dgemm_analyze.txt -
If you want to only roofline analysis, then execute:
There is no need forsrun -n 1 omniperf profile -n dgemm --roof-only -- ./dgemm -m 8192 -n 8192 -k 8192 -i 1 -r 10 -d 0 -o dgemm.csvsrunto analyze but we want to avoid everybody to use the login node. Explore the filedgemm_analyze.txt. -
We can select specific IP Blocks, like:
But you need to know the code of the IP Blocksrun -n 1 --gpus 1 omniperf analyze -p workloads/dgemm/MI200/ -b 7.1.2 -
If you have installed Omniperf on your laptop (no ROCm required for analysis) then you can download the data and execute:
omniperf analyze -p workloads/dgemm/MI200/ --gui -
Open the web page:
http://IP:8050/. The IP will be displayed in the output
For more exercises, visit here: https://github.com/amd/HPCTrainingExamples/tree/main/OmniperfExamples or locally HPCTrainingExamples/OmniperfExamples, there are 5 exercises, in each directory there is a readme file with instructions.
Pytorch example¶
This example is supported by the files in /project/project_465002175/Exercises/AMD/Pytorch (or the Exercises/AMD/Pytorch subdirectory in the download of the AMD exercises after the course: Download as .tar.bz2 or download as .tar).
These script experiment with different tools with a more realistic application. They cover PyTorch, how to install it, run it and then profile and debug a MNIST based training. We selected the one in https://github.com/kubeflow/examples/blob/master/pytorch_mnist/training/ddp/mnist/mnist_DDP.py but the concept would be similar for any PyTorch-based distributed training.
This is mostly based on a two node allocation.
-
Installing PyTorch directly on the filesystem using the system python installation.
./01-install-direct.sh -
Installing PyTorch in a virtual environment based on the system python installation.
./02-install-venv.sh -
Installing PyTorch in a condo environment based on the condo package python version.
./03-install-conda.sh -
Testing a container prepared for LUMI that comprises PyTorch.
./04-test-container.sh -
Test the right affinity settings.
./05-afinity-testing.sh -
Complete example with MNIST training with all the trimmings to run it properly on LUMI.
./06-mnist-example.sh -
Examples using rocprof, Omnitrace and Omniperf.
./07-mnist-rocprof.sh./08-mnist-omnitrace.sh./09-mnist-omnitrace-python.sh./10-mnist-omniperf.sh -
Example using Pytorch built-in profiling capabilities.
./11-mnist-pytorch-profile.sh
HIP optimization¶
Optimizing DAXPY HIP¶
In this exercise, we will progressively make changes to optimize the DAXPY kernel on GPU. Any AMD GPU can be used to test this.
DAXPY Problem:
Z = aX + Y
where a is a scalar, X, Y and Z are arrays of double precision values.
In DAXPY, we load 2 FP64 values (8 bytes each) and store 1 FP64 value (8 bytes). We can ignore the scalar load because it is constant. We have 1 multiplication and 1 addition operation for the 12 bytes moved per element of the array. This yields a low arithmetic intensity of 2/24. So, this kernel is not compute bound, so we will only measure the achieved memory bandwith instead of FLOPS.
Inputs¶
-
N, the number of elements inX,YandZ.Nmay be reset to suit some optimizations.Choose a sufficiently large array size to see some differences in performance.
Build Code¶
module load craype-accel-amd-gfx90a
module use /appl/local/containers/test-modules
module load rocm/6.2.4
git clone https://github.com/amd/HPCTrainingExamples.git
cd HPCTrainingExamples/HIP-Optimizations/daxpy
make
Run exercises¶
salloc -N 1 --ntasks=1 --partition=small-g --gpus=1 -A project_465002175 --time=00:30:00
srun ./daxpy_1 10000000
srun ./daxpy_2 10000000
srun ./daxpy_3 10000000
srun ./daxpy_4 10000000
srun ./daxpy_5 10000000
Things to ponder about¶
daxpy_1¶
This shows a naive implementation of the daxpy problem on the GPU where only 1 wavefront is launched and the 64 work-items in that wavefront loop over the entire array and process 64 elements at a time. We expect this kernel to perform very poorly because it simply utilizes a part of 1 CU, and leaves the rest of the GPU unutilized.
daxpy_2¶
This time, we are launching multiple wavefronts, each work-item now processing only 1 element of each array. This launches N/64 wavefronts, enough to be scheduled on all CUs. We see a big improvement in performance here.
daxpy_3¶
In this experiment, we check to see if launching larger workgroups can help lower our kernel launch overhead because we launch fewer workgroups if each workgroup has 256 work-items. In this case too, an improvement in measured bandwidth achieved is seen.
daxpy_4¶
If we ensured that the array has a multiple of BLOCK_SIZE elements so that all work-items in each workgroup have an element to process, then we can avoid the conditional statement in the kernel. This could reduce some instructions in the kernel.. Do we see any improvement? In this trivial case, this does not matter. Nevertheless, it is something we could keep in mind.
Question: What happens if BLOCK_SIZE is 1024? Why?
daxpy_5¶
In this experiment, we will use double2 type in the kernel to see if the compiler can generate global_load_dwordx4 instructions instead of global_load_dwordx2 instructions. So, with same number of load and store instructions, we are able to read/write two elements from each array in each thread. This should help amortize on the cost of index calculations.
To show this difference, we need to generate the assembly for these two kernels. To generate the assembly code for these kernels, ensure that the -g --save-temps flags are passed to hipcc. Then you can find the assembly code in daxpy_*-host-x86_64-unknown-linux-gnu.s files. Examining daxpy_3 and daxpy_5, we see the two cases (edited here for clarity):
daxpy_3:
global_load_dwordx2 v[2:3], v[2:3], off
v_mov_b32_e32 v6, s5
global_load_dwordx2 v[4:5], v[4:5], off
v_add_co_u32_e32 v0, vcc, s4, v0
v_addc_co_u32_e32 v1, vcc, v6, v1, vcc
s_waitcnt vmcnt(0)
v_fmac_f64_e32 v[4:5], s[6:7], v[2:3]
global_store_dwordx2 v[0:1], v[4:5], off
daxpy_5:
global_load_dwordx4 v[0:3], v[0:1], off
v_mov_b32_e32 v10, s5
global_load_dwordx4 v[4:7], v[4:5], off
s_waitcnt vmcnt(0)
v_fmac_f64_e32 v[4:5], s[6:7], v[0:1]
v_add_co_u32_e32 v0, vcc, s4, v8
v_fmac_f64_e32 v[6:7], s[6:7], v[2:3]
v_addc_co_u32_e32 v1, vcc, v10, v9, vcc
global_store_dwordx4 v[0:1], v[4:7], off
We observe that, in the daxpy_5 case, there are two v_fmac_f64_e32 instructions as expected, one for each element being processed.
Notes¶
-
Before timing kernels, it is best to launch the kernel at least once as warmup so that those initial GPU launch latencies do not affect your timing measurements.
-
The timing loop is typically several hundred iterations.
-
You may find that the various optimizations work differently in MI200 vs MI300 devices, and this may be due to differences in hardware architecture.